行程开关
《数字传感器:行程开关》
数字信号是指某些传感器提供两种不同状态的信号:高电平或低电平,开或关,逻辑1或逻辑0。数字信号是编程中最容易处理的信号类型。
行程开关是通过关闭或打开一组触点来工作的。一般来说,当开关闭合时会产生一个高电平,当开关打开时会产生一个低电平。
|
ID
|
名称
|
中文名称
|
数量
|
图片
|
|
1
|
TX Controller
|
TX控制器
|
1
|
|
|
2
|
Power Supply
|
电源
|
1
|
|
|
3
|
Wires
|
电线
|
2
|
|
|
4
|
switch
|
行程开关/接触开关
|
1
|
|
|
5
|
Lamp
|
LED灯(带灯座)
|
1
|
行程/接触开关安装在电路中以控制电子的流动。
执行机构是使开关打开和关闭的机械方法,常见的类型包括瞬时、拨动、滑动、摇杆等。
一个常开开关是指一个电路在其初始状态下是打开的,而执行器触发后,电路关闭从而允许电流通过;常闭开关是指初始状态下电流可以流过,除非触发执行器使开关打开,从而阻挡电流流动。
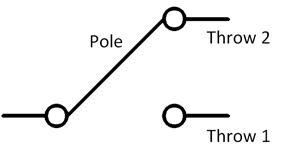
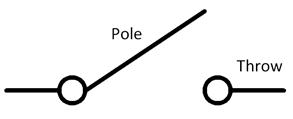
而慧鱼的行程开关是一种单刀双掷开关,一个输入和两个不同的输出路径,示意图如下:
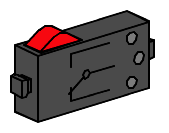
下图是实物照片。这是一个接触开关,这意味压下红色按钮(执行器)会临时性地改变路径,而松开后它便恢复到原来的位置。

拆开零件会看到其内部结构。默认情况下,中间的触点1和触点2是接通的,也就是常闭状态;触点1和触点3是断开的,是常开状态。
当按钮被按下时,触点1与2断开,而触点1和3之间接通,但这是一个临时性的接通,因为当松开按钮释放压力时,弹簧将使中间的簧片弹回到其默认的位置上。

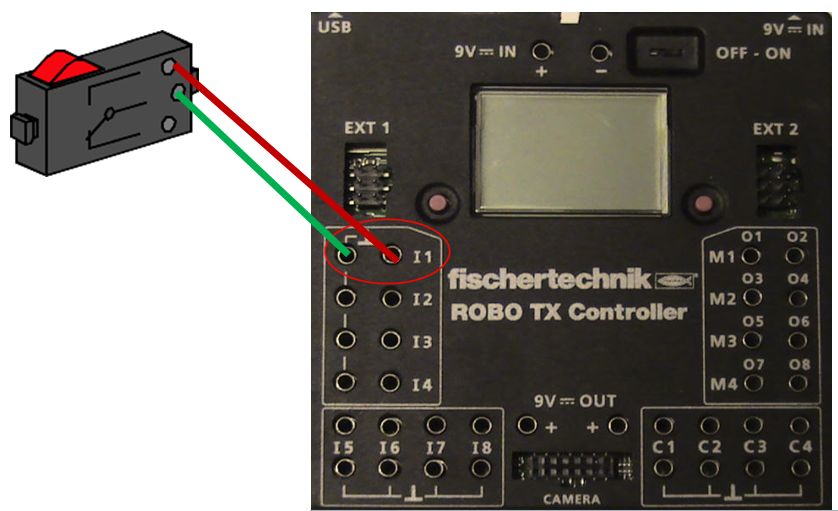
现在,将开关的触点1和触点3上连接到TX控制器的I1输入端:
之后,将下面的这些模块拖拽至编程窗口中:
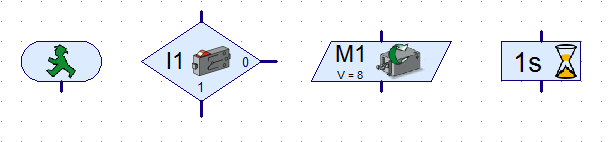
复制一组Moto output(马达输出)模块和Time delay(时间延迟)模块。
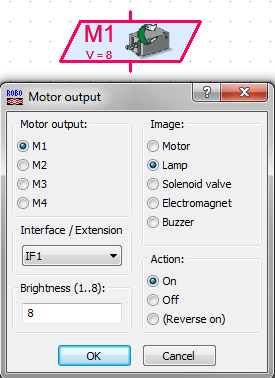
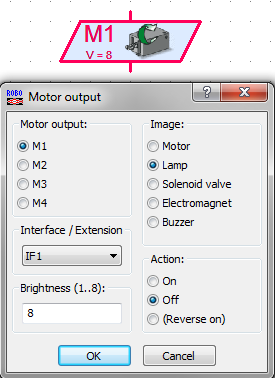
右键点击Moto output(马达输出)模块,在其属性面板上,设置其图标显示为Lamp(灯),一个设置为On(开),一个设置为Off(关)。
编写成以下简单的程序来测试行程开关:
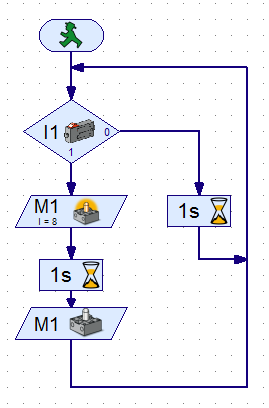
现在运行程序,观察开关触发后LED灯的点亮效果。
- 实验设备:
- 实验流程:
- 下图是一个常见的单刀单掷开关原理图:
-
-
-
-
将LED灯(带灯座)连接到TX控制器上的M1端子上,示意图如下:
-
-

-
-
在RoboPro创建一个新文件。设置环境为TX/TXT控制器,使用级别为初学者,在【COM / USB】设置窗口中设置为USB连接、TX控制器类型。
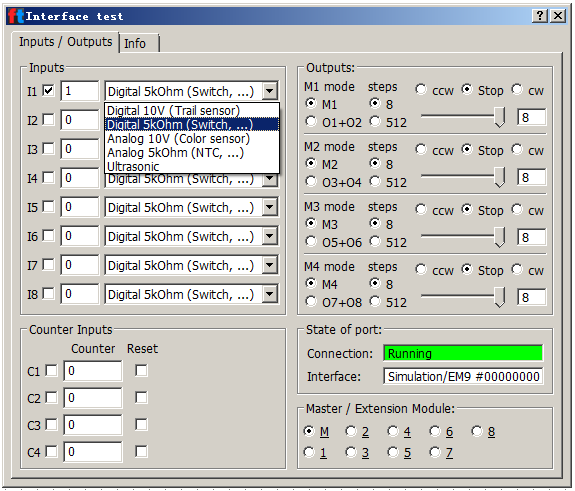
- 之后,在ROBO Pro软件的接口测试窗口中进行正确的传感器输入类型设置,本实验中,我们将I1输入端口的类型设置为“Digital 5kOhm(Switch)”,如下图所示:
-
-