
超声波传感器
《模拟传感器:超声波传感器》
|
ID
|
名称
|
中文名称
|
数量
|
图片
|
|
1
|
TX Controller
|
TX控制器
|
1
|
|
|
2
|
Power Supply
|
电源
|
1
|
|
|
3
|
Wires
|
电线
|
2
|
|
|
4
|
Ultrasonic Distance Sensor
|
超声波传感器
|
1
|
 |
|
5
|
Aluminum Strut 90
|
90mm 铝型材
|
2
|
 |
|
6
|
Link 15
|
15mm 连接件
|
2
|
 |
|
7
|
Building Block 30
|
30mm构建块
|
4
|
|
|
8
|
Encoder motor
|
编码电机
|
1
|
 |
|
9
|
switch
|
行程开关
|
1
|
 |
|
10
|
Tape Measure
|
卷尺
|
1
|
超声波是用于超出人类听觉范围的声波的术语。
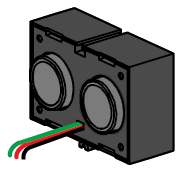
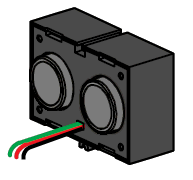
超声波传感器由发射器和接收器组成,发射器部分发射声音脉冲,接收器测量声波发射出去和反射回来之间所花费的时间。 超声波传感器通常可用于测量距离、风速、医用和报警。
慧鱼超声波距离传感器是一个有源传感器,需要连接到9V电源以保持其正常工作。
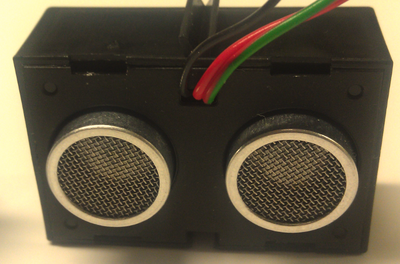
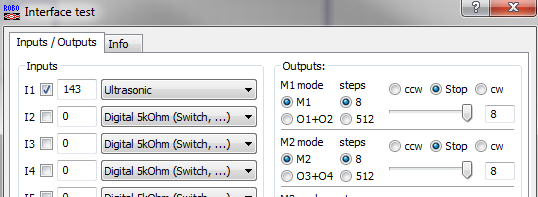
超声波传感器有3跟电线,其中红色电线需要接到控制器上的9V电源输出,绿色电线可以接到控制器上的任何“地”,本例中,接到I1输入端子组中的“地”。这些在下面用红色圈出。

另外一根黑色线是信号线,本例中接到I输入端口。
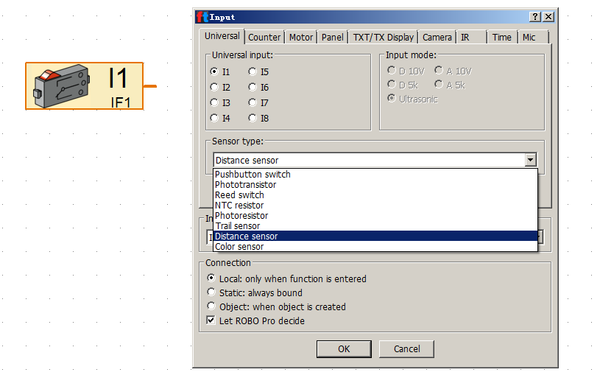
之后,在ROBO Pro软件的接口测试窗口中进行正确的传感器输入类型设置,本实验中,我们将I1的输入端口类型都设置为“Ultrasonic”,如下图所示:
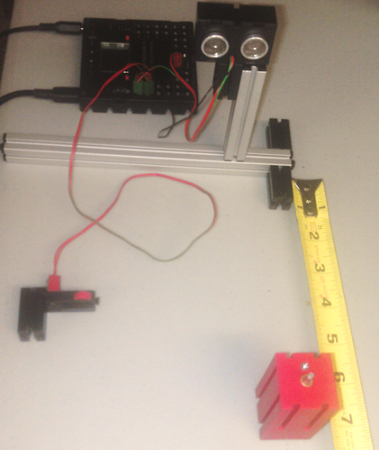
将卷尺打开, 垂直于超声波传感器所在平面,将编码马达作为被测物体首先放置于卷尺上6cm的位置,如下图所示:
从【程序模块】下的【基本模块】分类中拖拽出一下这些模块到编程窗口中:
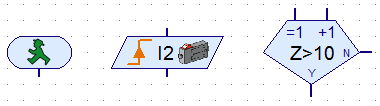
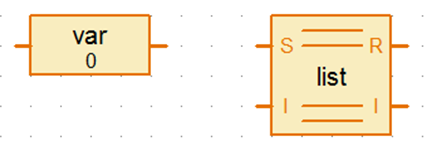
从【程序模块】下的【变量、定时器】分类中将“变量”模块和“列表”模块拖拽至程序窗口中:
从【程序模块】下的【变量、定时器】分类中将“加1指令”模块拖拽至程序窗口中:

从【程序模块】下的【输入、输出】分类中将“通用输入”模块拖拽至程序窗口中:

下面开始对各模块进行属性配置:
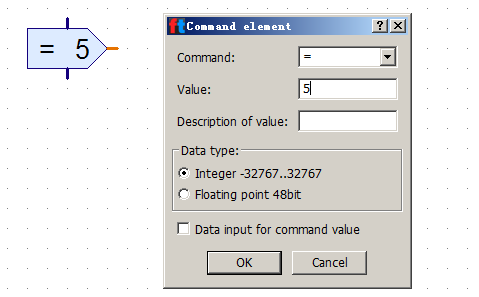
首先,复制一个“加1指令”模块,将它的属性设置为“=5”:
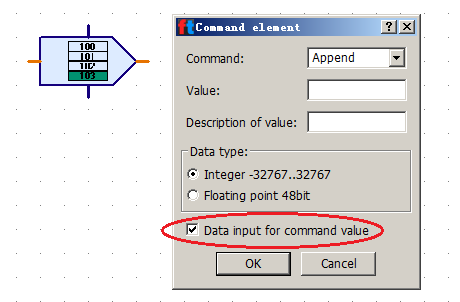
再次复制两个“加1指令”模块,将这两个的属性都设置为“Append”(表示对列表对象进行追加数值),注意还要勾选最下面的选项“Data input for command value”(指令值来自外部数值输入):
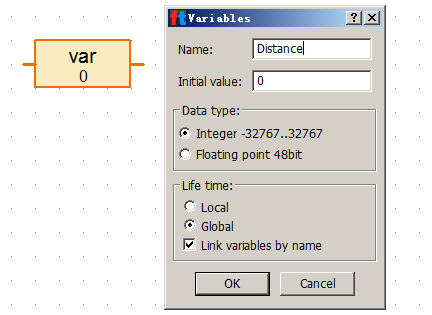
右键单击“变量”模块,在属性面板中将其命名为“distance”。 设置完成后,再复制两个该“变量”模块:
右键单击“通用输入”模块,并将类型设置为“距离传感器”。设置完成后,再复制三个该“通用输入”模块:
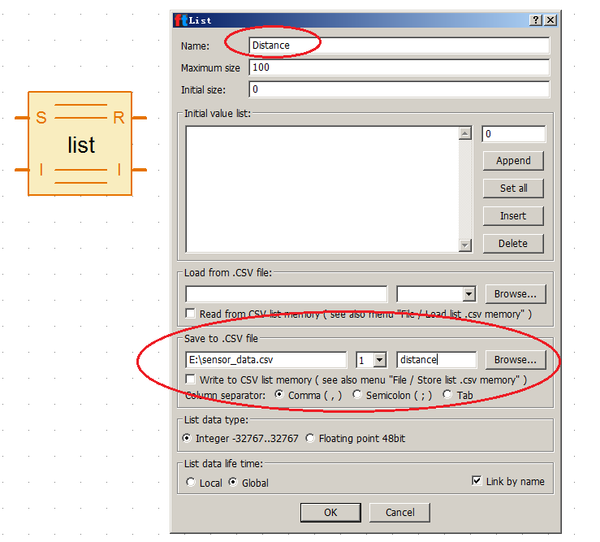
再复制一个“列表”模块。然后右键单击其中一个“列表”模块,重命名元素为“Distance”,在该对话框的中间部分是对数据进行保存方面的属性设置,注意“保存到.CSV文件”的这个设置区域:在这里点击右边的“Browser…”浏览按钮可以选择数据文件的本地保存位置,将下拉列表按钮的数值设置为“1”(该设置表示读取到的数值保存在数据文件中的第1列中),然后在右侧的文本框中输入“distance”(这个是设置数据文件中第1列的列标题):
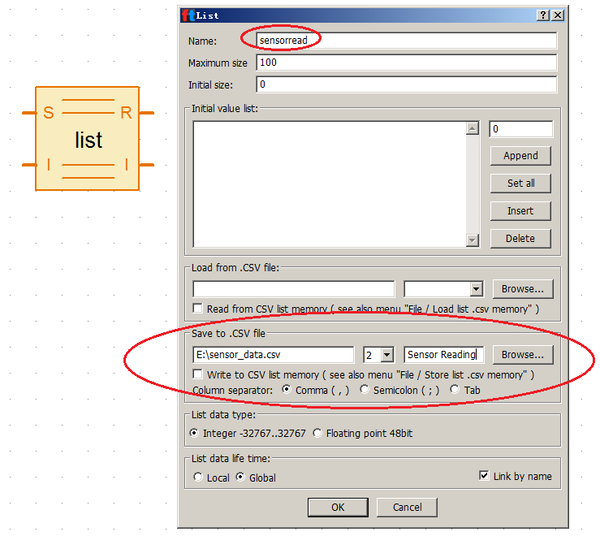
然后右键单击另一个“列表”模块,重命名元素为“sensorread”, 在“保存到.CSV文件”的这个设置区域里:点击“Browser…”浏览按钮选择与上一个“列表”模块同样的数据保存文件(也就是E盘下的sensor_data.csv),之后将下拉列表按钮的数值设置为“2”(该设置表示读取到的数值保存在数据文件中的第2列中),然后在右侧的文本框中输入“Sensor Reading”(这个是设置数据文件中第2列的列标题):
之后,通过流程线完成全部程序的设计,如下图所示:
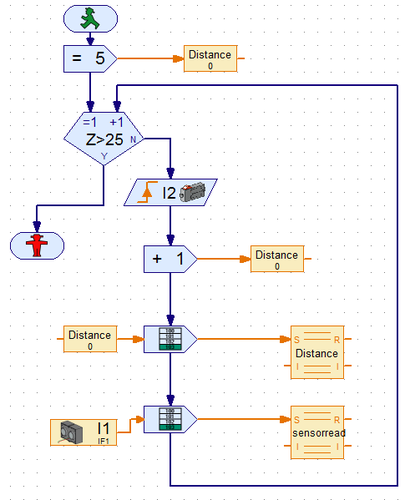
上面这个程序的大致逻辑是:进行25次的传感器数值记录,初始记录时,编码马达位置6CM的位置上,按下开关,将马达所在的位置和超声波传感器所检测到的两个数值分别记录到数据文件中的第1列和第2列中,然后移动马达向后到7CM的位置,再次按下开关进行数值记录,这样往复操作,每次移动马达向后一个单位距离,然后按动开关进行数值记录。直至25次后程序结束。
程序全部测试完毕后,我们打开E盘下的sensor_data.csv文件,可以查看到里面的数据:
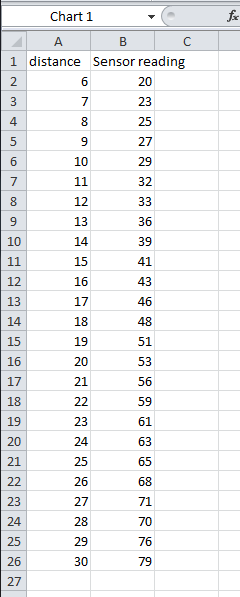
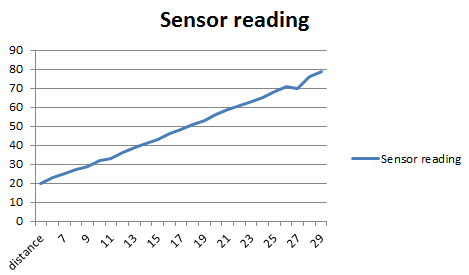
基于这些数据我们可以建立一个图表,通过图表我们可以看到超声波传感器的线性特征及其检测精度:
- 实验设备:
- 实验流程:
- 在RoboPro创建一个新文件。本实例中,设置环境为TX/TXT控制器,使用级别为“变量”,在【COM / USB】设置窗口中设置为USB连接、TX控制器类型。
-
-
实验结论:
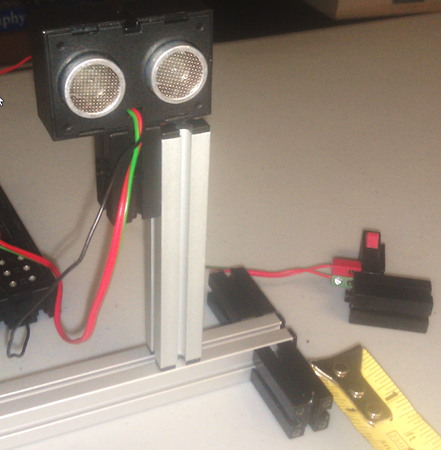
- 组装超声波传感器测试台,类似于下图。
- 用铝型材搭建一个结构,将超声波传感器安置于骑上。与地面接触的铝型材两边各安置一个30mm构建块,以稳定平台。另外在TX控制器上的I2输入端接入一个微动开关。

